A9-Dataset: Multi-sensor data sets for mobility research

High resolution data sets
With a constellation of 7 sensor stations equipped with more than 60 state-of-the-art and multi-modal sensors, and with a road network coverage of approximately 3.5 kilometers, the a9-dataset offers mobility researchers, industry partners, public authorities and policy makers high-resolution curated data sets created by capturing real-world traffic along freeways, country roads and urban traffic intersections. The data sets contain on the one hand labelled, time-synchronized and anonymized multi-modal sensor data covering area-scanning cameras, doppler radars, lidars and event-triggered cameras for a variety of traffic and weather-related scenarios, and on the other hand abstract digital twins of the traffic objects with position and trajectory-related information.
Release roadmap
The R0 set contains labelled multi-sensor data with a mix of random and sequential traffic scenarios from the A9 autobahn. The data from this set can be used as ground truth for the development and verification of AI-based detectors, tracking and fusion algorithms, and to understand and analyze the occurrence and the after-effects of a typical high speed crash incident on the autobahn.
The upcoming releases will contain amidst others, digital twins with information about trajectory and position, new traffic scenarios, longer sequences, and new locations including an urban traffic intersection. Keep watching this space for more.
Next planned release: April 2022
Registration
The A9-Dataset is available for download upon registration. Please register here to receive the download links.
R0_S0: 20s high speed crash scenario from the A9 autobahn
This set contains a 20s long time-synchronized multi-sensor sequence from the A9 autobahn covering a high speed crash. The situation is captured from both sides of the autobahn using four cameras which are are mounted on overhead gantry signs. The traffic objects are labelled with 3D bounding boxes and unique ids within each sensor frame to enable subsequent object-tracking and data-fusion.
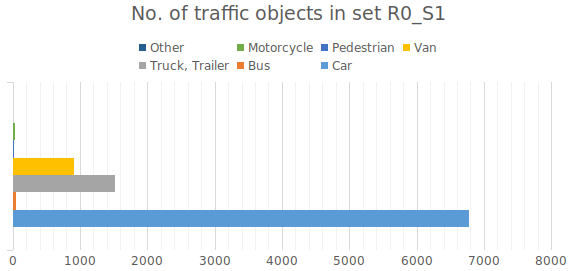
R0_S1: Random camera frames from the A9 freeway
This set contains a random selection of around 600 images from four cameras equipped with two types of lenses. They are are mounted on overhead gantry signs along the A9 expressway. The traffic objects are labelled with 3D bounding boxes and classified into one of 7 categories.
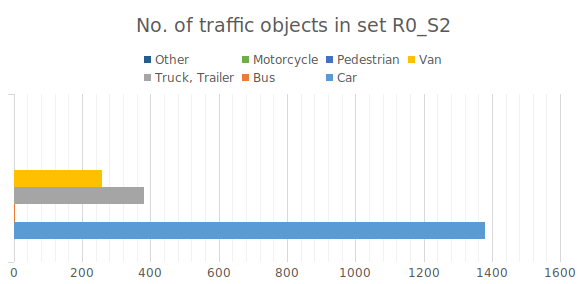
R0_S2: 25s camera sequence from the A9 freeway
This set contains a 25s sequence of images from a camera on the A9 freeway and also captures a number of lane change maneuvers. Apart from 3D bounding boxes and object classes, unique track-ids are also assigned to the traffic objects.
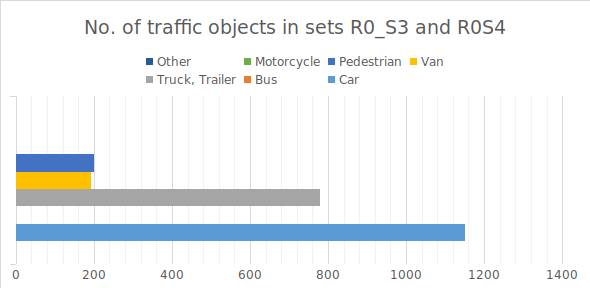
R0_S3 and R0_S4: Lidar sequences from the A9 freeway
The S3 and and S4 sets contain two different sequences of lidar point-cloud frames from overhead gantry bridges on the A9 freeway and are accompanied by labels including 3D bounding boxes and object classes.
Further articles

Cognition Factory: Evaluate and visualize camera data
Since the beginning of research on the digital twin, AI specialist Cognition Factory GmbH has focused on processing camera data. In the meantime Dr. Claus Lenz has deployed a large-scale platform

Digital real-time twin of traffic: ready for series production
Expand the test track, deploy new sensors, decentralize software architecture, fuse sensor data for 24/7 operation of a real-time digital twin, and make data packets public: TU Munich has decisively advanced the Providentia++ research project.

Elektrobit: Coining Test Lab to stationary data
Elektrobit lays the foundation for Big Data evaluations of traffic data. Simon Tiedemann on the developments in P++.