„Safety Guard“: Intel uses bird's eye view to explore new infrastructure-based safety concepts

Researchers at Intel Labs are using the digital twin in the Providentia++ research project to develop a “safety guard” that can warn road users of dangerous situations or help traffic control centers monitor the roadway to improve road safety. The new safety guard is based on Mobileye’s Responsibility-Sensitive Safety (RSS) model. Questions for researcher Bernd Gassmann from Intel Deutschland GmbH.
What does a Global Safety Guard do?
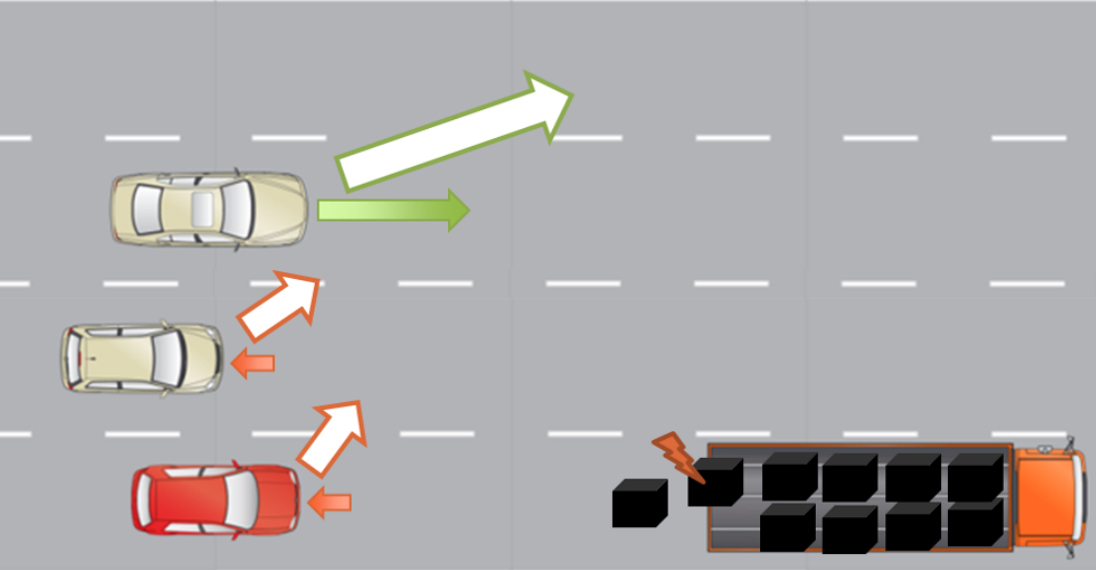
The Global Safety Guard is based on a safety functionality for automated driving that was transferred to infrastructure use and prototyped during the Providentia++ project. It initially works on the basis of the information from the digital twin. Given an object list of the road users of the digital twin, the safety distances of the road users are evaluated based on the definitions of the safety model Responsibility-Sensitive Safety (RSS) developed by our affiliate Mobileye. The model’s parameters such as reaction times or minimum braking decelerations of road users or, in the case of pedestrians, the maximum change in heading direction, are also considered for the calculations. When the safety distances between road users are violated, the safety model defines this as a “dangerous situation” and recalls the road users responsible for the dangerous situation.
What are the advantages of the Safety Guard for traffic?
First of all, the information can be used within the traffic infrastructure itself to constantly monitor the scene and evaluate traffic safety aspects using our safety metrics. Indeed, the safety metric also provides information about near-collisions and can, for example, highlight neuralgic traffic times or other problematic conditions. Here, the model’s parameters used, such as minimum braking decelerations, can also be adapted to weather conditions, for example. If continuous violations of the appropriate safety distances are observed, for example, on a section of highway or in an intersection, the traffic control center could reduce the speed limit or dynamically adjust traffic light phases.
Could road users also benefit directly from this safety approach?
Although it has not yet reached that stage, direct communication with road users is conceivable. Drivers, pedestrians or even cyclists could then be alerted to dangerous situations, for example (via an assistance system or smartphone app). In contrast to using the Safety Guard service as a passive safety metric, active coupling as a warning or assistance system would result in the entire system and contributing components being subject to the same functional safety criteria as today’s driver assistance systems themselves. Thus, the guarantees regarding the reliability and accuracy of the digital twin and the computing, software and communication components involved would have to be correspondingly high, since errors in this context could have serious consequences. However, once this coupling of the infrastructure with warning and assistance systems is realized in a safe manner, possibilities arise that go beyond the individual capabilities of the assistance systems: the infrastructure has a global view of the scene and is also aware of conditions on the roads outside the individual vehicle’s field of view. The additional information from a bird’s-eye view can help vehicles make faster progress in intersections that are difficult to see, for example, if hazards in occluded areas can be ruled out. In addition, the infrastructure could also initiate coordinated safety maneuvers by multiple road users in emergencies to mitigate complex hazardous situations.
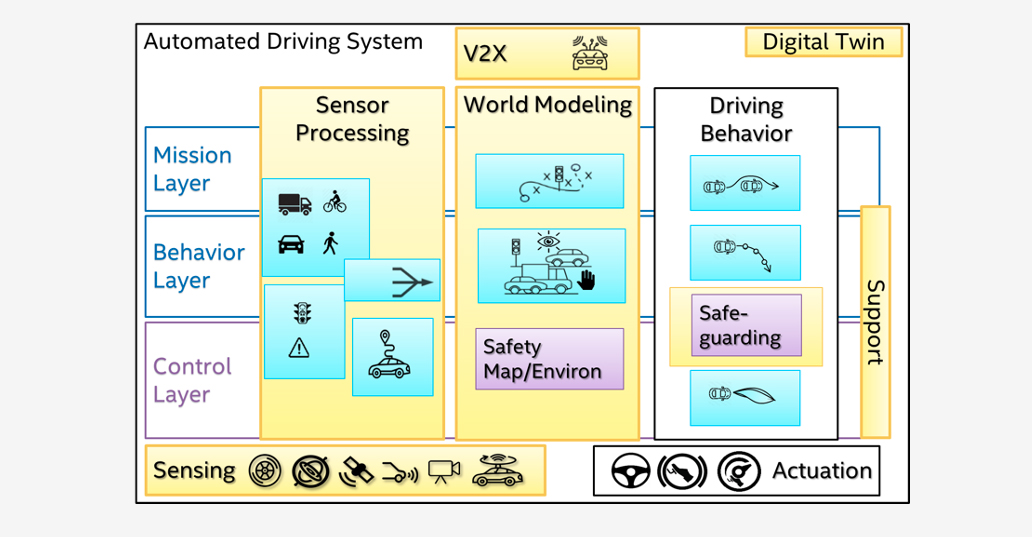
The graphic shows what an overall system can look like that integrates the digital twin from Providentia++ into a driver assistance system.
What is the current status? Has the Safety Guard already been tested in practice?
In initial experiments, for example, traffic on the A9 test field was evaluated for two hours on a Friday afternoon as part of the Providentia++ research project, taking into account around 7,500 vehicles whose distance from each other was less than 6 seconds. It was noticed, for example, that 20% of the individual measurements had a distance of less than 0.9 seconds. This could result in suspension or removal of the driver’s license. Fortunately for the drivers, all measurements were made with anonymized data. With the choice of very assertive values for the safety metric’s parameters (e.g., reaction time of 0.1 seconds and high braking accelerations of -11.0 m/s2), 5% of the individual measurements were flagged as “dangerous situation”, whereas when moderate values for the metric’s parameters are used (e.g., reaction time of 0.2 seconds, braking acceleration of -3.6 m/s2), 60% of the individual measurements were considered “dangerous”. After the initial testing, continuous operation would be possible and could thus provide a lot of insightful data for better understanding human driving behavior. These findings can now be used to derive meaningful parameters’ values for the Safety Guard. Furthermore, a trial in the intersection areas of the improved digital twin from Providentia++ will be conducted to evaluate and assess the safety in the intersection environment including pedestrians.
Details on the current development can be found on our research page: