
Autonomes Fahren: Hochauflösende Straßenkarten in 3D als zusätzlicher Sensor
Hochauflösende Straßenkarten sind Voraussetzung für automatisiertes und autonomes Fahren – und machen es sicherer. Diese HD Maps geben den Fahrzeugen quasi den Rahmen vor, in dem sie sich bewegen dürfen.
Wenn das Holzkirchener Unternehmen 3D Mapping Solutions mit seinen Messfahrzeugen ausrückt, ist klar: Jetzt werden wieder Straßen millimetergenau vermessen. Eine Millionen Punkte pro Sekunde nehmen die zwei Lidar-Sensoren auf dem Dach der Fahrzeuge jeweils auf, hinzu kommen meist drei bis vier Kameras zum Einsatz und Messgeräte, um Zeit und Ort exakt festzuhalten. Sind die verfügbaren Daten zusammengeführt, werden Verkehrszeichen, Ampeln und Markierungslinien extrahiert und die Verkehrslogik ergänzt. Eine hochauflösende „hochgenaue und intelligente“ dreidimensionale Karte entsteht. Von „Höhenmodellen im Millimeterbereich“ spricht der Kartograph und Projektmanager Markus Grünke vom assoziierten Partner von Providentia++ 3D Mapping Solutions und von „fotogrammetrischen Messungen“, mit denen präzise ermittelt werden kann, wie groß Objekte sind und wo sie liegen.
HD Map als weiterer Sensor
Hochauflösende 3D-Karten, auch High-Definition Maps (HD Maps) genannt, sind für das automatisierte und autonome Fahren sehr wichtig. Denn sie setzen den Rahmen, in dem sich ein Fahrzeug bewegen kann, während die Sensoren an Bord sofort auf Veränderungen im Verkehr reagieren können. „Eine HD Map ist wie ein weiterer leistungsfähiger Sensor“, erläutert Grünke. Bei Schnee und Nebel etwa liefern Bordsensoren nicht immer optimale Ergebnisse. HD Maps helfen einem Fahrzeug zu verstehen, was die eigenen Sensoren wirklich sehen. Hinzu kommt die begrenzte Reichweite der Sensoren im Fahrzeug von bis zu ein paar hundert Metern, während die HD-Karte auch über den reinen Sichtbereich hinaus ein aktuelles Abbild der Wirklichkeit inklusive Leitplanken, Bäumen, Gräben und anderen verkehrsrelevanten Objekten kennt. „Die Verkehrsgeometrie ist also bekannt, so dass im Vorfeld Berechnungen möglich werden“, erläutert Grünke. Aktuell sind es meist Forschungsprojekte wie etwa Providentia++ (P++), für die eines der Messfahrzeuge von 3D Mapping Solutions aktiv wird und begrenzte Areale abfährt. Besonderheit bei P++: Über die HD Map hinaus bietet P++ noch weitere zusätzliche Sensoren auf, die der externen Infrastruktur, die aus der Vogelperspektive auf den Verkehr schauen und ebenfalls mehr sehen als die On-Board-Sensoren.
„Eine HD Map ist wie ein weiterer leistungsfähiger Sensor“, sagt Kartograph Markus Grünke von 3D Mapping Solutions.
Mercedes-Benz S 500: Erstes Fahrzeug mit HD Map
Gerade zehn Jahre ist es her, als Forscher von Mercedes Benz zum ersten Mal eine „high-definition map“ vorstellten, die schließlich im Modell S 500 der S-Klasse zum Einsatz kam. Dessen erste autonome Fahrt ging über Stadt und Land, 103 Kilometer weit. Zum Einsatz kam eine hochauflösende Straßenkarte von HERE Technologies, einem Geodatendienst, dessen Technologie inzwischen in diversen Fahrzeugen wie Audi, BMW und Daimler zum Einsatz kommt. Heute sind viele Wettbewerber auf dem wichtigen Zukunftsmarkt zu finden, darunter auch TomTom, Civil Maps, Google und (für besonders hohe Präzision) 3D Mapping Solutions.
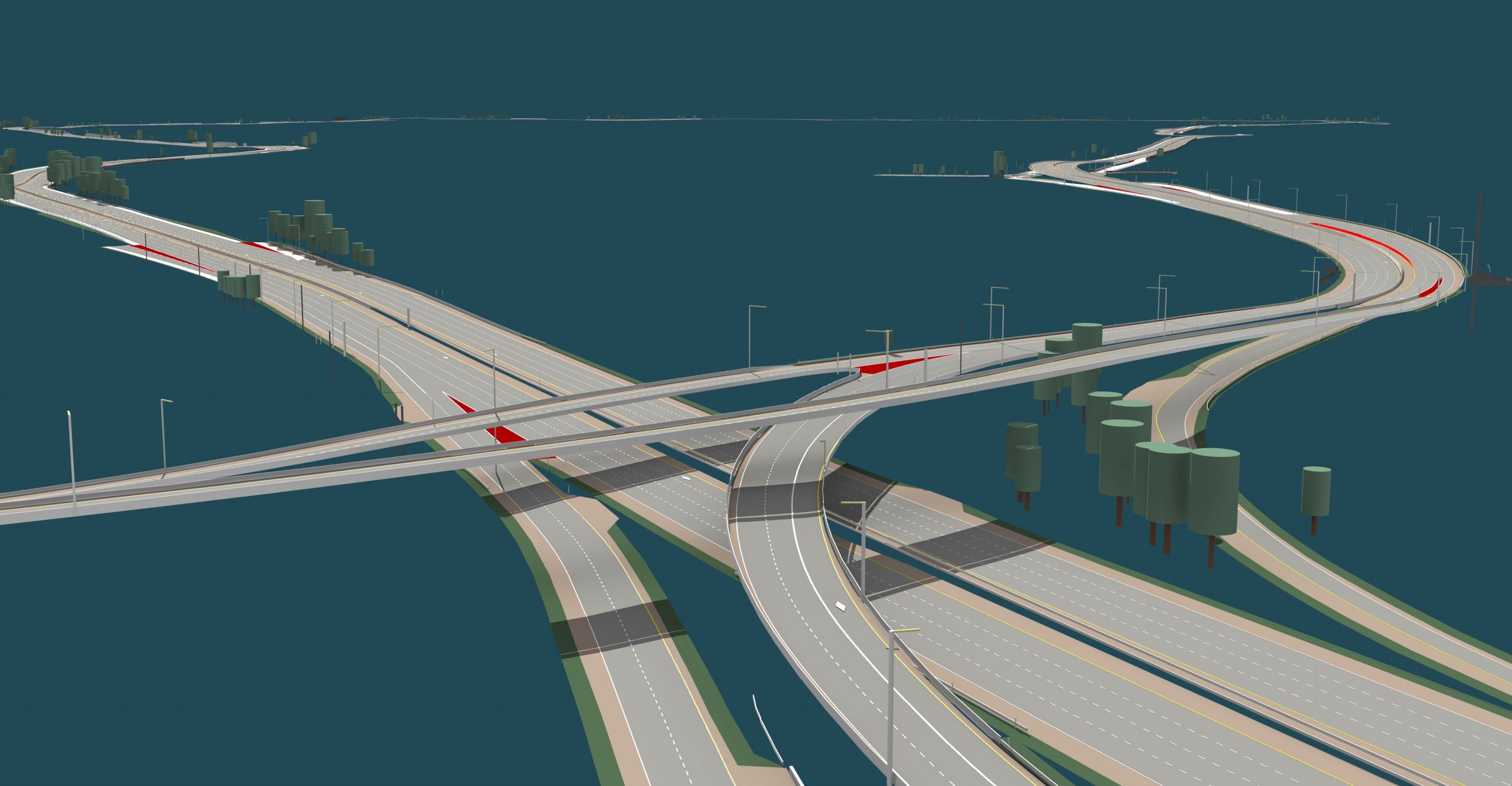
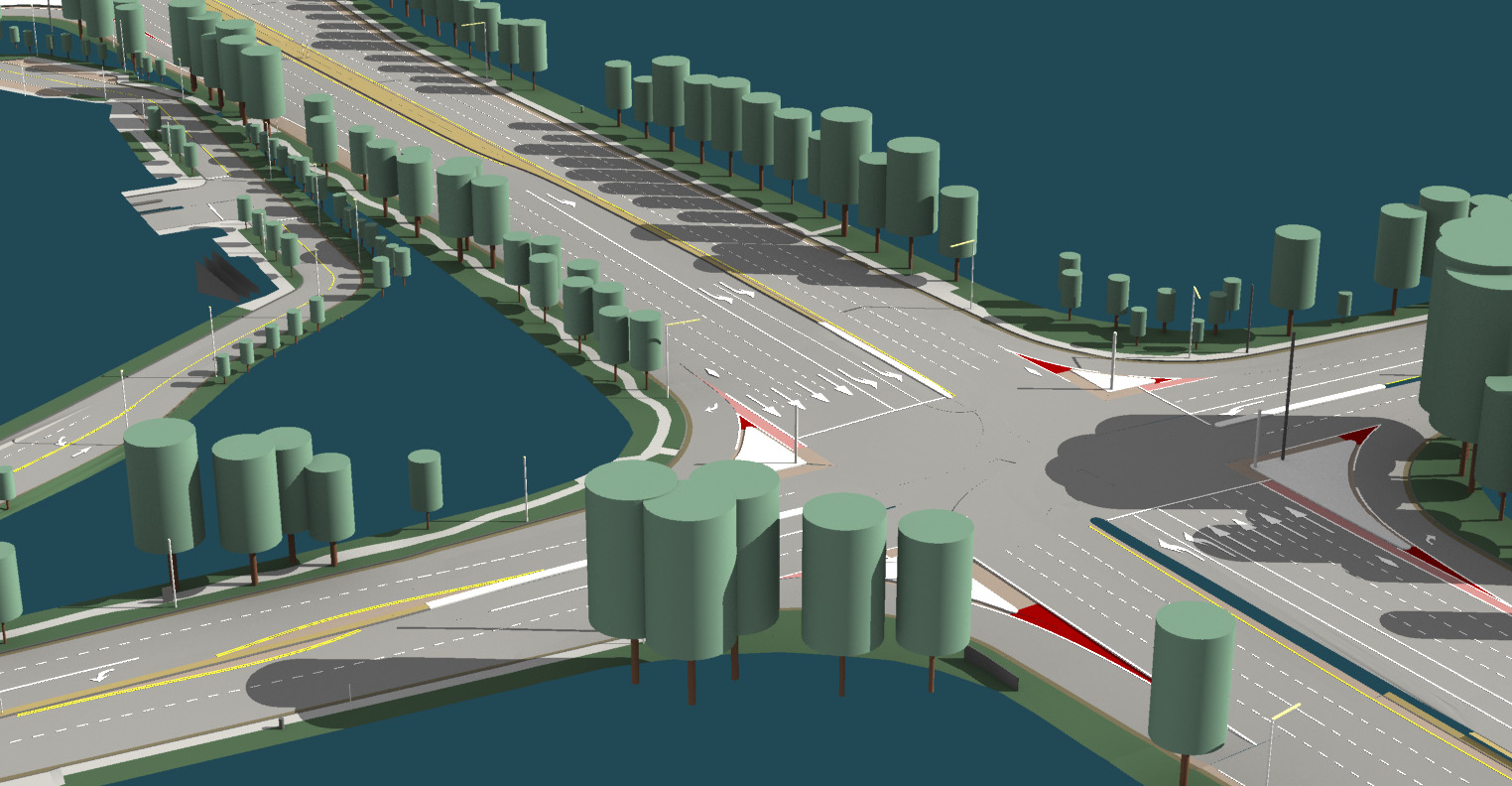

Für die Erweiterung der Testrecke im Rahmen des Forschungsprojektes Providentia++ wird 3D Mapping Solutions Straßenkarten in 3D erstellen. Quelle: 3D Mapping Solutions, TUM
5G: Übertragungsraten um das 50-fache steigern
Die Herausforderungen der HD Maps hat der Wissenschaftler Heiko Seif in einer Forschungsarbeit für die Sheffield Hallam University vor wenigen Jahren so beschrieben: Das Fahrzeug muss in der Lage sein, sehr genau selbst bestimmen zu können, wo es sich befindet (I.). Es muss auf Ereignisse reagieren können, die über die Reichweite der Bordsensorik hinausgehen (II.). Und es muss sich immer im Einklang mit den Bedürfnissen auch anderer Verkehrsteilnehmer befinden (III.). Gerade die letzten zwei Anforderungen hinken noch den Erwartungen hinterher, da sie Aktualisierungen in Echtzeit erfordern. In der Regel werden HD Maps jedoch über Nacht aktualisiert und nicht adhoc. Echtzeit-HD-Maps sind noch Zukunftsmusik oder regional begrenzt. Die so genannten SLAM-Algorithmen (kurz für: simultaneous localisation and mapping) seien – so Wissenschaftler Seif – zwar vielversprechend. Allerdings kommt in einer Stunde auf der Straße durchaus ein Terabyte an Daten zusammen – eine Menge, für die es viel zu lange dauern würde, um einem Navigationssystem verwertbare Ergebnisse in Echtzeit zur Verfügung stellen zu können. Mit der Funktechnologie 5G werden Übertragungsraten von 100 Mbit pro Sekunde auf das 50-fache steigen – eine Chance, um die nötigen Anforderungen an Echtzeitanwendungen in Fahrzeugen näher zu kommen, die gerade einmal Latenzzeiten von maximal 10 Millisekunden zulassen.
Sicherheit im Verkehr: HD Map und externe Infrastruktur als zusätzliche Sensoren
Die Ziele im Forschungsprojekt P++ sind andere: Im nächsten Schritt geht es dem assoziierten Partner von P++ 3D Mapping Solutions darum, die erweiterte Teststrecke hinein nach Garching-Hochbrück entlang der Bundesstraße 471 zu kartieren und hochauflösende Straßenkarten für die Testfahrzeuge von Valeo, Elektrobit und Fortiss für eine begrenzte Strecke aufzubereiten und zur Verfügung zu stellen. In Echtzeit sind diese Daten nicht nötig, da die externe Infrastruktur an Schilderbrücken und Sensorstationen die Perspektive über die Reichweite der bordeigenen Sensoren hinaus bereits liefert. Doch jedes Mal, wenn ein Messfahrzeug mit einem Mobile-Mapping-System von 3D Mapping Solutions wieder auf der Teststrecke unterwegs ist, nimmt er den Verkehrskorridor auf und Veränderungen an städtischen Objekten wahr. Grünke: „Diese Daten werden dann wieder zurück zur Basisstation gespielt – und die Karten aktualisiert.“ Nicht in Echtzeit, aber millimetergenau.
WEITERE AKTUELLE THEMEN

Cognition Factory: Kameradaten auswerten und visualisieren
Seit Beginn der Forschungen in Providentia++ am digitalen Zwilling ist KI-Spezialist Cognition Factory GmbH auf die Verarbeitung von Kameradaten fokussiert. Geschäftsführer Dr. Claus Lenz mit seinem Resümee.

Digitaler Echtzeitzwilling des Verkehrs: Serienreif und rund um die Uhr einsetzbar
Konsortialführer TU München hat das Forschungsprojekt für automatisiertes und autonomes Fahren Providentia++ entscheidend vorangebracht. TUM-Projektleiter Venkatnarayanan Lakshminarashiman zieht Bilanz.

Elektrobit: Test Lab auf stationäre Daten münzen
Elektrobit legt nicht zuletzt durch die Fortschritte in Providentia++ die Basis für Big-Data-Auswertungen von Verkehrsdaten. Simon Tiedemann von Elektrobit über die Entwicklungen im Rahmen von P++.