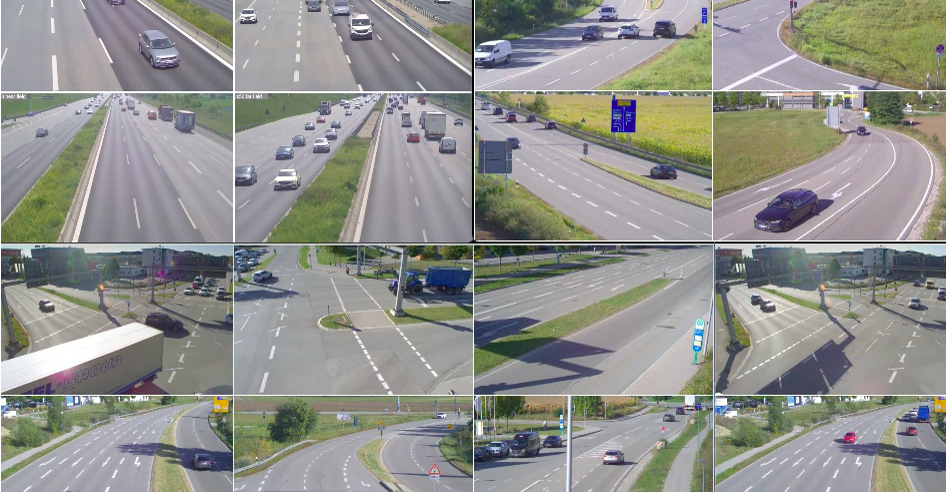
Das Testfeld A9 befindet sich in der Nähe von Garching bei München. Schilderbrücken und Sensormasten an der Autobahn A9, der Landstraße B 471 und an einer Kreuzung in Garching-Hochbrück sind mit Sensoren bestückt, die den Verkehr beobachten.
In den vier Darstellungen sehen Sie die Gesamtübersicht (links), den virtuellen Live-Zwilling des Verkehrs auf der A9 (zweiter Kasten v. links), den Liveverkehr auf Landstraße (zweiter Kasten von rechts) und an der Kreuzung mit detektierten und klassifizierten Verkehrsteilnehmern (farbige Kästchen um die Objekte, rechts).
Bei der Darstellung des virtuellen Verkehrs kann es aufgrund der großen Datenmenge zu leichten Verzögerungen im Aufbau des Bildes kommen.
Forschungsprojekt Providentia++ beendet: Entwicklung des Prototyps eines digitalen Echtzeitzwillings ist abgeschlossen
Fünfeinhalb Jahre nach dem Start des Forschungsprojektes Providentia ist bestätigt: Ein digitaler Echtzeitzwilling des Verkehrs ist möglich. Der entsprechende Prototyp ist präzise und robust. Digitale Informationen von der Teststrecke können für Mehrwertdienste verwendet werden. Zum Abschluss der durch das Bundesministerium für Digitales und Verkehr (BMDV) gesponsorten Forschungen haben sich die beteiligten Forscherinnen und Forscher aller Partner in Garching-Hochbrück noch einmal getroffen und ihre Ergebnisse präsentiert.
Mehr über die konkreten Erfolge im Projekt erfahren Sie im Interview mit dem technischen Projektleiter Venkatnarayanan Lakshminarasimhan.
A9 Dataset: Wissenschaftliche Daten vom Testfeld A9 zum Download
Ab sofort stellt die TU München Daten vom Testfeld A9 der Allgemeinheit zur Verfügung. Mit über 60 Sensoren wie Flächenkameras, Radaren, Lidaren, Rundumkameras und Event-based Kameras wird im Forschungsprojekt Providentia++ ein breites Spektrum an Sensorik eingesetzt. Deren Daten helfen, KI-basierte Modelle zu trainieren und KI-Netzwerke zu verbessern, Verkehrsverhalten zu analysieren, den Verkehrsfluss zu optimieren, Simulationen für Smart-City-Lösungen zu entwickeln sowie Trackingalgorithmen oder Szenarien zu erforschen.
Providentia++: Das Testfeld für automatisiertes und autonomes Fahren
Die erste Phase des Providentia-Projektes hat grundsätzlich gezeigt, dass die digitale Autobahn der Zukunft möglich ist. Die Herausforderung: Moderne Fahrzeuge, die mit Radar- und Lidarsensoren ausgestattet sind, vermessen zwar das Umfeld des Fahrzeugs, sind in ihrer Reichweite aber beschränkt. Zudem sind sie nicht in der Lage, hinter vorbeifahrende Fahrzeuge zu schauen. Providentia bietet ein „fahrzeugübergreifendes System“, das die Sensorik des eigenen Fahrzeugs ergänzt. In den ersten drei Jahren wurde gezeigt, dass es technisch möglich ist, mithilfe von Schilderbrücken, die mit Radarsystemen und Kameras ausgestattet wurden, in Echtzeit einen digitalen Zwilling des Verkehrs auf der Autobahn A9 zu erstellen. Dieses virtuelle Abbild kann nun an jedes vernetzte Fahrzeug gesendet und so die Reichweite der Sensorik im Fahrzeug erhöht werden. Per App lassen sich diese fusionierten Daten zudem dazu nutzen, Spurempfehlungen zu geben oder vor Unfällen zu warnen.
Video: besserdrei.de, 7-2021



WEITERE BEITRÄGE AUS DEM PROJEKT

Cognition Factory: Kameradaten auswerten und visualisieren
Seit Beginn der Forschungen in Providentia++ am digitalen Zwilling ist KI-Spezialist Cognition Factory GmbH auf die Verarbeitung von Kameradaten fokussiert. Geschäftsführer Dr. Claus Lenz mit seinem Resümee.

Digitaler Echtzeitzwilling des Verkehrs: Serienreif und rund um die Uhr einsetzbar
Konsortialführer TU München hat das Forschungsprojekt für automatisiertes und autonomes Fahren Providentia++ entscheidend vorangebracht. TUM-Projektleiter Venkatnarayanan Lakshminarashiman zieht Bilanz.

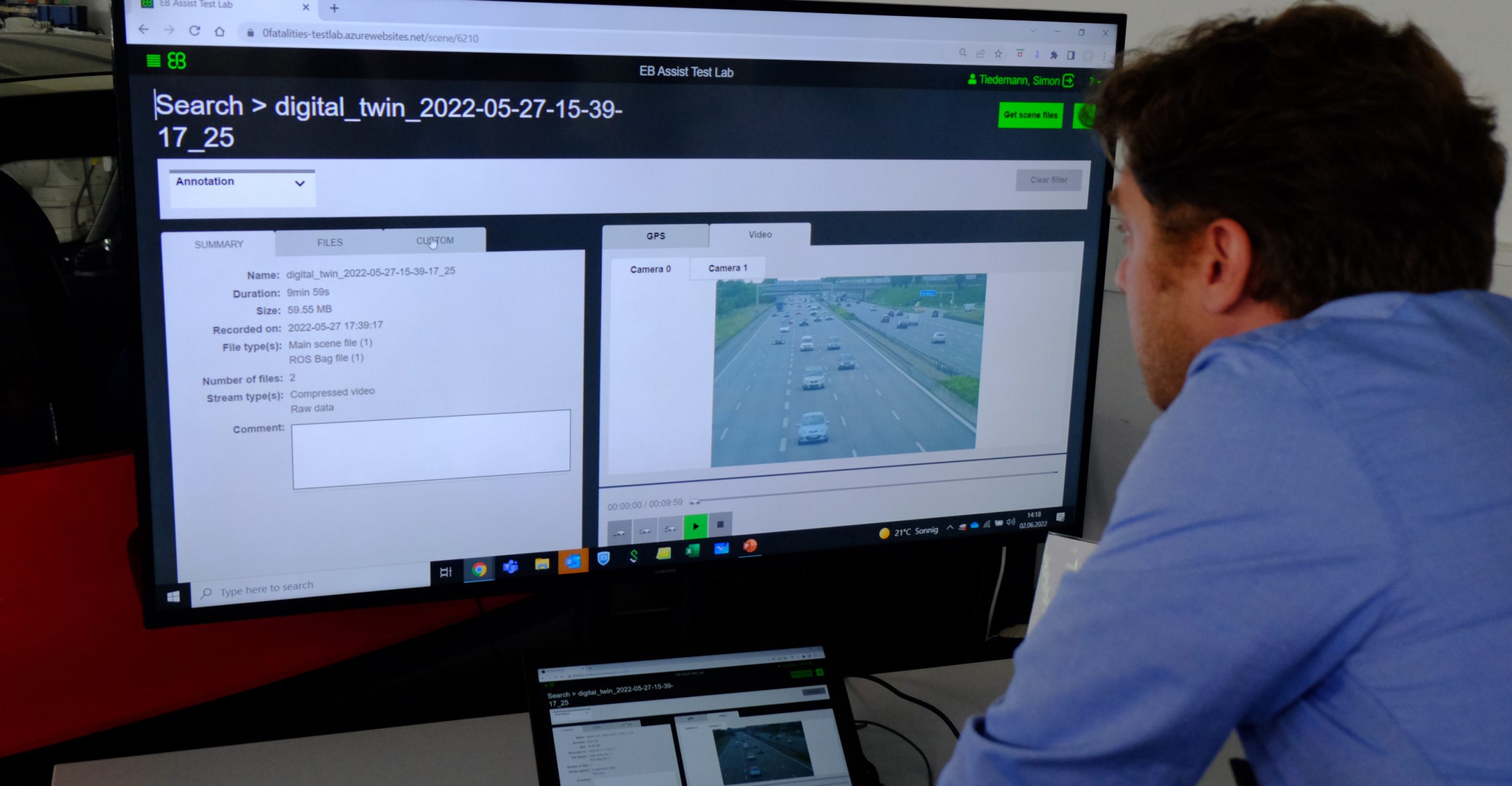
Elektrobit: Test Lab auf stationäre Daten münzen
Elektrobit legt nicht zuletzt durch die Fortschritte in Providentia++ die Basis für Big-Data-Auswertungen von Verkehrsdaten. Simon Tiedemann von Elektrobit über die Entwicklungen im Rahmen von P++.
Wissenschaft: Das autonome Fahren im Blick
Ein Team von Wissenschaftlern am Lehrstuhl für Robotik, künstliche Intelligenz und Echtzeitsysteme der TU München arbeitet täglich daran, die bestehende Infrastruktur zu erweitern, die Objektdetektion zu verbessern, die Datenfusion zu beschleunigen und echtzeitfähig und das Gesamtsystem robust gegen äußere Einflüsse zu machen. Das Video gibt Einblicke in die Arbeit der Forscher der TU München, zeigt, womit sie sich beschäftigen und was sie begeistert.
Dem digitalen Zwilling auf der Spur
Video: besserdrei.de, 12-2020
Testfeld A9: Sieben Sensorstationen und ihr Potenzial
Video: besserdrei.de, 7-2021
Testfeld A9: Die Herausforderungen im Projekt
Video: besserdrei.de, 7-2021
Voraussetzung für automatisiertes und autonomes Fahren: Die Vogelperspektive für mehr Sicherheit
Providentia ist ein Kürzel und steht für Proaktive Videobasierte Nutzung von Telekommunikationstechnologien in innovativen Autoverkehr-Szenarien. Providentia ist zudem die römische Göttin der Vorsehung und der Fürsorge, was gut zusammenpasst. Denn durch den digitalen Zwilling wird es vernetzten Fahrzeugen künftig möglich sein, Vorhersagen darüber zu treffen, auf welcher Spur das Fahrzeug unterwegs sein sollte, um möglichst optimal durch den Verkehr zu kommen und Staus zu vermeiden. Zudem trägt er dazu bei, Unfällen vorzubeugen, da die Sensorik in der Lage ist, Gefahren vorherzusehen.
Providentia ist ein Kürzel und steht für Proaktive Videobasierte Nutzung von Telekommunikationstechnologien in innovativen Autoverkehr-Szenarien. Providentia ist zudem die römische Göttin der Vorsehung und der Fürsorge, was gut zusammenpasst. Denn durch den digitalen Zwilling wird es vernetzten Fahrzeugen künftig möglich sein, Vorhersagen darüber zu treffen, auf welcher Spur das Fahrzeug unterwegs sein sollte, um möglichst optimal durch den Verkehr zu kommen und Staus zu vermeiden. Zudem trägt er dazu bei, Unfällen vorzubeugen, da die Sensorik in der Lage ist, Gefahren vorherzusehen.
Erste Phase: Erprobung des digitalen Zwillings auf der Autobahn
In der ersten Phase des Providentia-Projektes wurden auf einer Teststrecke an der Autobahn A9 (im Bild: Schilderbrücken 2 und 3) bereits hochauflösende Kameras und Radarsysteme auf zwei Schilderbrücken montiert, Sensordaten über 5G per Funk übertragen, künstliche Intelligenz eingesetzt, um Fahrzeugtypen und -klassen zu erkennen und die Daten „fusioniert“ – also ein digitaler Zwilling geschaffen. Ein autonomes Fahrzeug wurde entwickelt, das beispielsweise die Informationen aus dem digitalen Zwilling dafür nutzen kann, eigenständig die Spur auf der Autobahn zu wechseln oder das Tempo zu drosseln, um Staus aus dem Weg zu gehen oder Unfälle zu vermeiden.

In der ersten Phase des Providentia-Projektes wurden auf einer Teststrecke an der Autobahn A9 (im Bild: Schilderbrücken 2 und 3) bereits hochauflösende Kameras und Radarsysteme auf zwei Schilderbrücken montiert, Sensordaten über 5G per Funk übertragen, künstliche Intelligenz eingesetzt, um Fahrzeugtypen und -klassen zu erkennen und die Daten „fusioniert“ – also ein digitaler Zwilling geschaffen. Ein autonomes Fahrzeug wurde entwickelt, das beispielsweise die Informationen aus dem digitalen Zwilling dafür nutzen kann, eigenständig die Spur auf der Autobahn zu wechseln oder das Tempo zu drosseln, um Staus aus dem Weg zu gehen oder Unfälle zu vermeiden.
Zweite Phase: Von der Autobahn ins Wohngebiet
Nachdem bis Ende 2019 die Infrastruktur auf der Autobahn A9 aufgebaut und der digitale Zwilling des Autobahnverkehrs entwickelt wurde, geht es im nächsten Schritt darum, die eingesetzte Technik zu verfeinern, die Infrastruktur in den „urbanen Raum“ zu erweitern und Mehrwertdienste zu entwickeln. Neue Sende- und Sensorikmasten sollen am Rande eines Autobahnzubringers bis hinein in bewohntes Gebiet aufgebaut werden. Das Besondere: Kreuzungen, Kreisverkehre, Bushaltestellen, Bahnhöfe und Park- und Ride-Parkplätze können anonymisiert durch die Sensorik erfasst werden.
Erstmals kommen Lidare zum Einsatz, die in der Regel einen größeren Winkel abdecken als Radare. Zudem werden „Mehrwertdienste“ für Fahrer, Autobahnbetreiber, Fahrzeughersteller und die Wissenschaft entstehen. Das Folgeprojekt Providentia++ ist Anfang des Jahres 2020 gestartet und zunächst auf zwei Jahre ausgelegt. Das laufende Projekt Providentia++ wird mit 9,16 Millionen Euro vom BMVI und industriellen Partnern gefördert. Als Industriepartner mit dabei sind die TU München als Konsortialführer, Cognition Factory, Elektrobit Automotive, Valeo, fortiss, und Intel Deutschland. Zusätzliche assoziierte Partner sind Huawei Technologies Deutschland, IBM Deutschland, brighter AI und 3D Mapping Solutions.
Providentia++: 4 Forschungsbereiche für automatisiertes und autonomes Fahren
OBJEKTERKENNUNG in Multisensor-Szenarien
Allein auf zwei Schilderbrücken an der A9 sind acht Flächenkameras und acht Radare im Einsatz, die ständig Daten über die aktuelle Verkehrssituation erfassen. Pro Sekunde fallen bei einer Flächenkamera etwa 400 Megabit an – knapp 35 Gigabyte pro Tag. Da die Systeme letztlich möglichst echtzeitfähig sein sollen, reduziert ein Backend-Rechner diese Datenmenge auf das Wesentliche – die Informationen über das Objekt und die Klasse sowie deren Position. Letztlich fallen so pro Objekt nur noch einige hundert Bytes an. Gerade diese geringe Datenmenge macht es möglich, dass deren Übertragung in Echtzeit möglich ist.
DATENFUSION und digitaler Zwilling
Das Ziel ist, mit möglichst minimalem Aufwand Objekte eindeutig zu erkennen und deren Position zu ermitteln. Es gibt diverse Herausforderungen für die Fusion der Sensordaten: So nehmen Kameras und Radare Bilddaten in unterschiedlicher Frequenz auf – die Kameras mit 30 Frames pro Sekunde, die Radare mit 10 Frames pro Sekunde. Eine Synchronisierung ist nötig. Zudem werden Sensordaten nicht immer störungsfrei übertragen. Schwingungen auf den Schilderbrücken und schlechte Wetterbedingungen können die Datenqualität beeinträchtigen. Die Herausforderung besteht darin, die einzelnen Datenquellen zu bewerten und zu gewichten und damit die Basis für lokale digitale Zwillinge, die an den jeweiligen Messstationen entstehen, und globale Zwillinge zu legen, die letztlich alle verfügbaren Sensordaten mit berücksichtigen.
FEHLERTOLERANZ, Zuverlässigkeit und Skalierbarkeit
Auch wenn einzelne Sensoren schlechte Daten liefern oder gar ausfallen, muss das Gesamtsystem in der Lage sein, dennoch zuverlässige Informationen liefern zu können. Das Ziel besteht darin, dass das Gesamtsystem autonom in der Lage ist, zu entscheiden, welche Systeme genutzt und welche nicht in die Berechnungen mit einbezogen werden. So wird der digitale Zwilling fehlertolerant und liefert zu jeder Zeit verwertbare Informationen für Fahrzeuge, die Mehrwertdienste aus dem digitalen Zwilling nutzen. Interessant ist auch, dass Assistenzsysteme in den Fahrzeugen in der Lage sind, ihre eigenen Sensordaten über die externe Infrastruktur auf Plausibilität hin zu überprüfen. Das macht den digitalen Zwilling noch einmal sicherer. Vor Kollisionsgefahr zu warnen, den Verkehrsfluss zu verbessern, den Verkehr zu steuern und eine Echtzeitanalyse des Verkehrs zu ermöglichen: Das sind Services, die für ganz unterschiedliche Interessengruppen interessant sind, vom Fahrzeughalter über Autobahnbetreiber bis hin zu Autoherstellern.
KOMMUNIKATIONSPROTOKOLL
Der Datenaustausch zwischen den Systemeinheiten und den Fahrzeugen in Echtzeit erfordert maßgeschneiderte Nachrichtenprotokolle, die die vorhandene Netzwerkkapazität an die jeweilige Situation anpassen und Aufgaben priorisieren. Jedes Fahrzeug, das in der Nähe der Schilderbrücken unterwegs ist, bekommt individuell aufbereitete Informationen – also seinen individuellen digitalen Zwilling. Fragen zwei Fahrzeuge zur gleichen Zeit aus der gleichen „Region of Interest“ einen digitalen Zwilling an, bekommen sie ihn per Broadcast, ansonsten per Unicast. Die Zuordnung muss stimmen.
Datenfusion, Prädiktion, V2X: Unsere wissenschaftlichen Publikationen
Vergleich der Testfelder mit externer Infrastruktur für automatisiertes und autonomes Fahren
Intelligent Transport Systems (ITS) mit externer Infrastruktur: 350 weltweite Publikationen und 40 Testfelder für automatisiertes und autonomes Fahren im Vergleich.

Mit autonomen Agenten Bewegungen vorhersagen
Um Bewegungen vorhersagen zu können, ist es nötig, viele Optionen (Trajektorien) in Erwägung zu ziehen und sie zu priorisieren. Das Modell FloMo arbeitet mit Wahrscheinlichkeiten und ist auf Basis von drei Datasets trainiert worden.

C-V2X: Architektur für den Einsatz in bewegten Kolonnen
Zuverlässige V2X-Kommunikation ist in der Entwicklung intelligenter Transportsysteme entscheidend. Das Netzwerk-Infrastruktur-Management und Radio-Ressourcen müssen jedoch in großem Maßstab realisierbar und bezahlbar sein.
"Eine Entwicklung hin zu autonomen Fahrzeugen kann auf einmal auch sehr schnell gehen."
Je besser Sensoren aus Fahrzeugen und Infrastruktur vernetzt sind, umso lückenloser lässt sich der Verkehrsraum erfassen. Das dient letztlich nicht nur dem Autofahrer, sondern auch allen anderen Verkehrsteilnehmern. Der Leiter des Konsortiums Providentia++ und Mobilitäts-Experte Prof. Dr. Alois Knoll über seine Vision von der Mobilität der Zukunft.

Je besser Sensoren aus Fahrzeugen und Infrastruktur vernetzt sind, umso lückenloser lässt sich der Verkehrsraum erfassen. Das dient letztlich nicht nur dem Autofahrer, sondern auch allen anderen Verkehrsteilnehmern. Der Leiter des Konsortiums Providentia++ und Mobilitäts-Experte Prof. Dr. Alois Knoll über seine Vision von der Mobilität der Zukunft.
PROVIDENTIA-TEAM

Bernhard Blieninger, Wissenschaftler, fortiss

Christian Creß, Wissenschaftler, TU München

Markus Dillinger, Director 5G R&D, Huawei

MarianGläser, CEO, brighter AI

Ralf Gräfe, Program Manager, Intel Labs Europe

Dr.-Ing. Gunnar Gräfe, Geschäftsführer, 3D Mapping Solutions

Gereon Hinz, Gastwissenschaftler, STTech

Dr. Jens Honer, Senior Expert, Valeo

Xinyi Li, Wissenschaftler, TU München

Juri Kuhn, Wissenschaftler, fortiss

Venkatnarayanan Lakshminarasimhan, Wissenschaftler, TU München

Dr. Claus Lenz, CEO, Cognition Factory

Marie-Luise Neitz, Managerin Drittmittel-Projekte, TU München
Andreas Schmitz, PR und Kommunikation, TU München

Christoph Schöller, Wissenschaftler, fortiss

Leah Strand, Wissenschaftlerin, TU München

Simon Tiedemann, Senior Product Manager, Elektrobit

Walter Zimmer, Wissenschaftler, TU München
PARTNER
(Konsortialführer)



ASSOZIERTE PARTNER





FÖRDERER